درس ۱۹: مکانیزم چرخدنده سیارهایی (خورشیدی)
آشنایی با مکانیزم چرخدنده سیارهایی (خورشیدی)
در دروس قبلی آشنایی با علم طراحی مکانیزمها، مکانیزمهای مختلفی را بررسی کردیم که میتوانید آنها را در سری مقالات [ علم طراحی مکانیزمها ] مطالعه کنید. در این قسمت قصد داریم تا شما را با مکانیزم چرخدنده سیارهایی (خورشیدی) آشنا کنیم.
چرخدندهها یکی از اقسام انتقال قدرت به روش مکانیکی هستند که دارای انواع مختلفی هستند. در مقاله ۰ تا ۱۰۰ آشنایی با انواع چرخدندهها و کاربردشان به بررسی انواع چرخدندهها و کاربردشان در صنعت پرداخته شده است. در این مقاله قصد داریم که مکانیزم چرخدنده سیارهایی یا به اصطلاح عامیانه چرخدنده خورشیدی را بررسی کنیم و با کاربرد آن بیشتر آشنا شویم. قبل از بررسی مکانیزم چرخدنده سیارهایی (خورشیدی) باید کمی در مورد چرخدندهها صحبت کنیم و سپس در ادامه به بررسی مکانیزم چرخدنده سیارهایی خواهیم پرداخت.
مفاهیم نسبت چرخدندهها
فرض کنید که دو چرخدنده، با هم درگیر هستند اگر فرض شود چرخدنده A بزرگتر از چرخدنده B باشد و چرخدنده A محرک باشد و چرخدنده B را بچرخاند مطابق تصویر زیر:
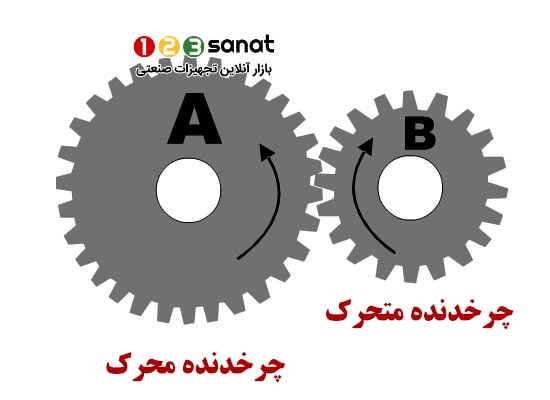
در این صورت سرعت چرخدنده B از رابطه زیر بدست میآید.
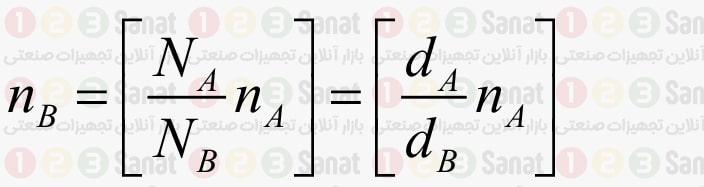
در رابطه فوق داریم:
۱) $n$= تعداد دور بر حسب rev/min
۲) $N$= تعداد دندانه
۳) $d$= قطر متوسط چرخدنده
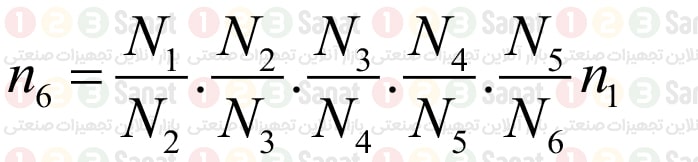
معادله فوق برای تمام چرخدندهها اعم از ساده، مارپیچ، مخروط و حلزونی قابل استفاده میباشد. رابطه فوق را میتوان مجموع سری چرخدندهها که به صورت متوالی پشت سر هم قرار گرفتهاند به صورت زیر توسعه داد. در تصویر زیر که مربوط به یک جعبه دنده (گیربکس) با ۶ تا چرخدنده است که با هم درگیر هستند.

برای محاسبه سرعت چرخدنده شماره ۶، که از چرخدنده شماره ۱ نیرو و گشتاور میگیرد از رابطه زیر استفاده میکنیم.
علت توسعه چرخدنده سیارهایی (خورشیدی)
همانطور که مشاهده کردید یک محدودیت اصلی استفاده از مجموعه چرخدنده ساده به منظور کاهش یا افزایش دور، اتلاف انرژی و اشغال حجم زیاد به علت نیاز به تعداد زیاد چرخدنده، به منظور جلوگیری از ایجاد پدیده تداخل میباشد. در مثال فوق چرخدنده ۲، ۳، ۴ و ۵ هرز گرد هستند و تأثیری در دور چرخدنده ۶ ندارد اما حضور آنها اجتناب ناپذیر است.
لذا یکی از روشهایی که به این منظور توسعه پیدا کرده است استفاده از مکانیزم چرخدنده سیارهایی یا چرخدنده خورشیدی است. در استفاده از مکانیزم چرخدنده سیارهایی چرخش چرخدندهها، حول چرخدندههای دیگر نتایج بسیار مثبتی را به همراه خواهد داشت.
به مکانیزم چرخدنده سیارهایی یا چرخدنده خورشیدی، چرخدنده اپی سیکلوئید نیز گفته میشود و علت آن این است که حین چرخش چرخدنده خورشیدی داخلی، تشکیل یک منحنی اپی سیکلوئید را میدهد برای اطلاعات بیشتر مقاله درس ۱۳: مکانیزمهای سیکلوئید، اپی سیکلوئید و هیپو سیکلوئید را مطالعه بفرمایید.
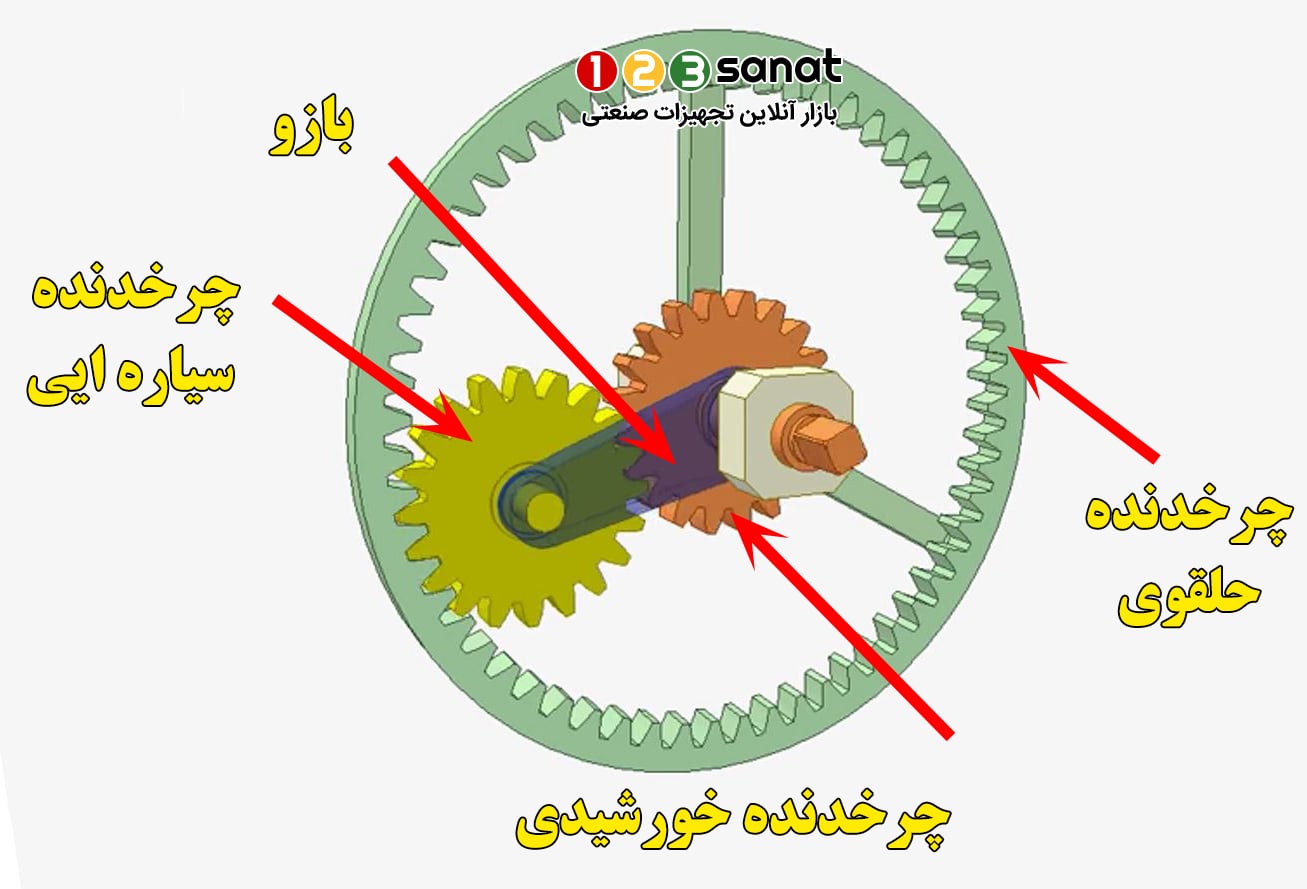
مجموعهی چرخدنده سیارهایی یا چرخدنده خورشیدی معمولاً شامل یک چرخدنده خورشیدی (Sun Gear)، یک بازو و یک یا چندین چرخ دنده سیارهای (Planetary Gear) است. مطابق شکل زیر.
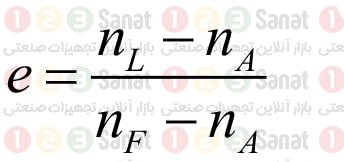
در مکانیزم چرخدنده سیارهایی برای محاسبه نسبت خروجی، از رابطه زیر استفاده میکنیم که در این رابطه داریم:
$n_{F}$= سرعت نخستین چرخدنده در مجموعه سیارهایی بر حسب rev/min
$n_{L}$= سرعت آخرین چرخدنده در مجموعه سیارهایی بر حسب rev/min
$n_{A}$= سرعت بازو بر حسب rev/min
این صفحه را با دیگران به اشتراک بگذارید و امتیاز بگیرید
برای نوشتن دیدگاه باید وارد بشوید.