درس ۱۳: مکانیزمهای سیکلوئید، اپی سیکلوئید و هیپو سیکلوئید
مکانیزمهای سیکلوئید، اپی سیکلوئید و هیپو سیکلوئید
در دروس قبلی آشنایی با علم طراحی مکانیزمها، مکانیزمهای مختلفی را بررسی کردیم که میتوانید آنها را در سری مقالات [ علم طراحی مکانیزمها ] مطالعه کنید. در این قسمت قصد داریم تا شما را با مکانیزمهای سیکلوئید، اپی سیکلوئید و هیپو سیکلوئید آشنا کنیم.
در صنعت و در قطعات و تجهیزات مختلف از انواع منحنیهای صنعتی استفاده میکنیم که انشا… در یک مقاله جداگانه به بررسی انواع انواع منحنیهای صنعتی، خواهیم پرداخت. منحنیهای سیکلوئید (Cycloid)، اپی سیکلوئید (Epicycloid) و هیپو سیکلوئید (Hypocycloid) همگی منحنیهای هندسی هستند که در ریاضیات و فیزیک مورد استفاده قرار میگیرند. این منحنیها از ترکیب حرکت یک نقطه روی دایره یا دایرهها مشتق شدهاند. در ادامه به توضیح هر یک از این منحنیها و کاربردهای آنها میپردازیم.
منحنی سیکلوئید
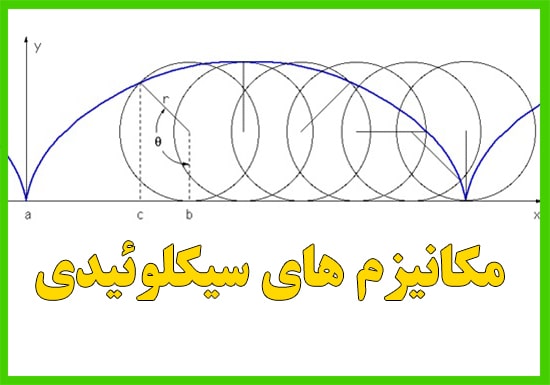
منحنی سیکلوئید و به انگلیسی Cycloid که گاهی با نام چرخزاد از آن نام برده میشود همانطور که از نام آن پیدا است توسط به حرکت در آمدن یک نقطه روی دایره ساخته میشود. به عبارت دیگر اگر شما یک نقطه ثابت را روی دایره در نظر بگیرید با چرخش دایره، اثر نقطه در صفحه تشکیل منحنی سیکلوئید را خواهد داد که در تصویر زیر مشاهده میکنید.
منحنی Cycloid در مختلف زمینهها مانند مهندسی، ریاضیات، فیزیک و حتی طراحی صنعتی کاربرد دارد. برخی از کاربردهای مهم آن شامل مسائل مرتبط با مدارها و حرکت، محاسبات حجم در مسائل انتگرال، طراحی دستگاهها و ماشینآلات، و حتی طراحی چرخها در دوچرخهها میباشد.

مکانیزم شماره ۱ منحنی سیکلوئید
مکانیزمی که در ویدئو زیر مشاهده میکنید، اساس کار آن بر منحنی سیکلوئید است. این مکانیزم در بسیار از پمپهای پیسونی که میخواهیم دبی خروجی آن متغیر باشد استفاده میشود. [ برای اطلاعات بیشتر مقاله ۰ تا صد انواع پمپهای هیدرولیک را مطالعه بفرمایید ]. در این مکانیزم با استفاده از یک چرخدنده حلزونی که با یک پیچ حلزون سیارهایی خارجی درگیر است میتوان مقدار کورس قبل تغییر محوری که به چرخدنده داخلی، چرخدنده سیارهایی درگیر است را تغییر داد.
این صفحه را با دیگران به اشتراک بگذارید و امتیاز بگیرید
برای نوشتن دیدگاه باید وارد بشوید.