درس ۲۰: سیر تا پیاز مکانیزم بادامک و پیرو

آشنایی با مکانیزم بادامک
در دروس قبلی آشنایی با علم طراحی مکانیزمها، مکانیزمهای مختلفی را بررسی کردیم که میتوانید آنها را در سری مقالات [ علم طراحی مکانیزمها ] مطالعه کنید. در این قسمت قصد داریم تا شما را با مکانیزم بادامک و پیرو آشنا کنیم.
مکانیزم بادامک (Cam) و پیرو (Follower) نوعی مکانیزم است که روی محور سوار شده و باعث حرکت رفت و برگشتی پیرو میشود. مکانیزم بادامکها یکی از اصلیترین مکانیزمهای صنعتی برای تبدیل حرکت چرخشی به حرکت خطی (رفت و برگشتی) یا به انگلیسی Reciprocating Motion میباشد.
حرکت پیرو در مکانیزم بادامک توسط الگو یا شکل منحنی بادامک که از قبل تعیین شده است مشخص میشود. پیرو از طریق نیروی جاذبه یا توسط یک فنر با بادامک همواره در تماس است. نکتهایی که شاید کمتر در مورد مکانیزم بادامک شناخته شده باشد، این است که در حقیقت مکانیزم بادامک یک تایمر مکانیکی است و قبل از گسترش سیستمهای الکترونیک و مدار مجتمع به شکل امروزی اصلیترین مکانیزمی که برای زمانبندی عملیاتهای مختلف در ماشینها وجود داشت، مکانیزم بادامک بود. امروزه هنوز هم از مکانیزم بادامک برای ایجاد زمانبندی استفاده میشود که مهمترین آن در سوپاپ خودرو است.
از مکانیزم بادامک علاوه بر سوپاپ در موتورهای احتراقی که وظیفه باز و بسته شدن سوپاپها را دارد؛ در ماشینهای خیاطی، اسباب بازیهای كودكان و بسیاری دیگر از كاربردهای مكانیكی مورد استفاده قرار میگیرند.
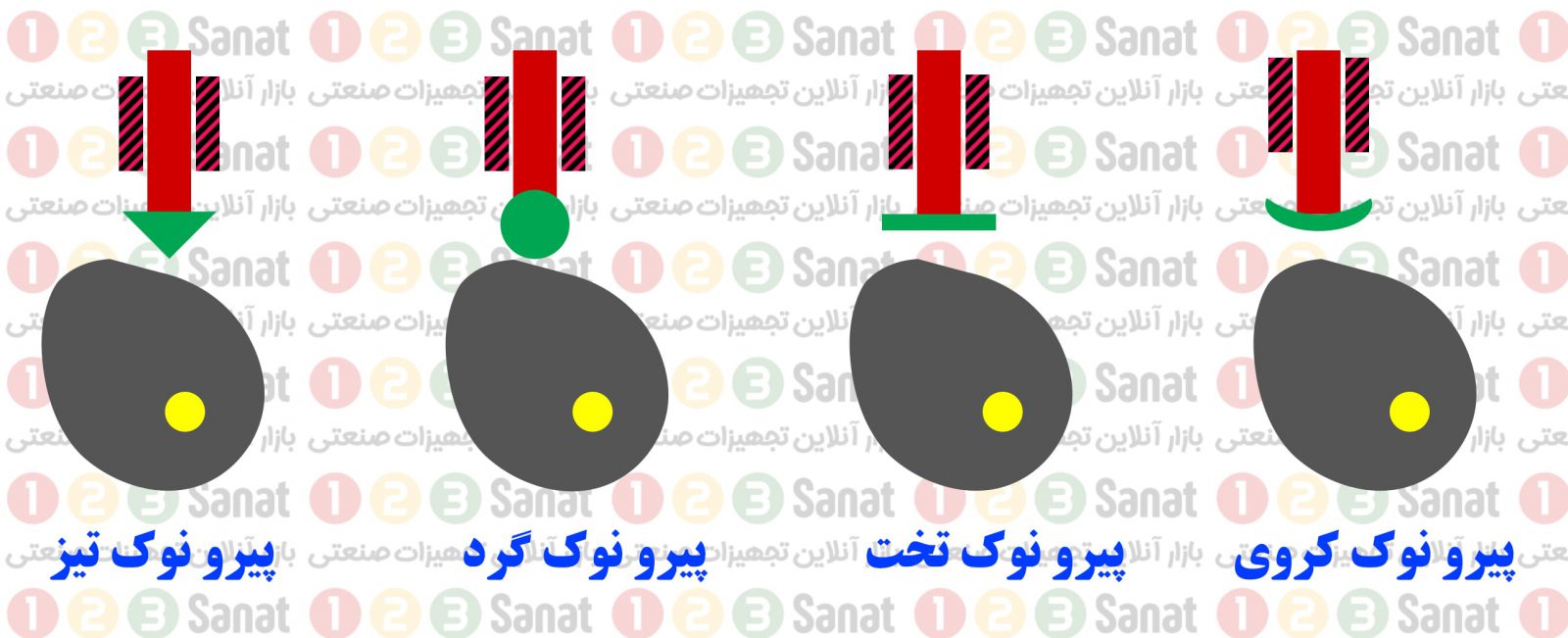
نوک پیرو یا همان Follower در مکانیزم بادامک، میتواند اشکال مختلفی را داشته باشد که در تصویر زیر میبینید، اما متداولترین نوک پیرو، نوک گرد به علت انتقال حرکت نرمتر و سایش کمتر بادامک میباشد.

نمودار جابجایی بادامک
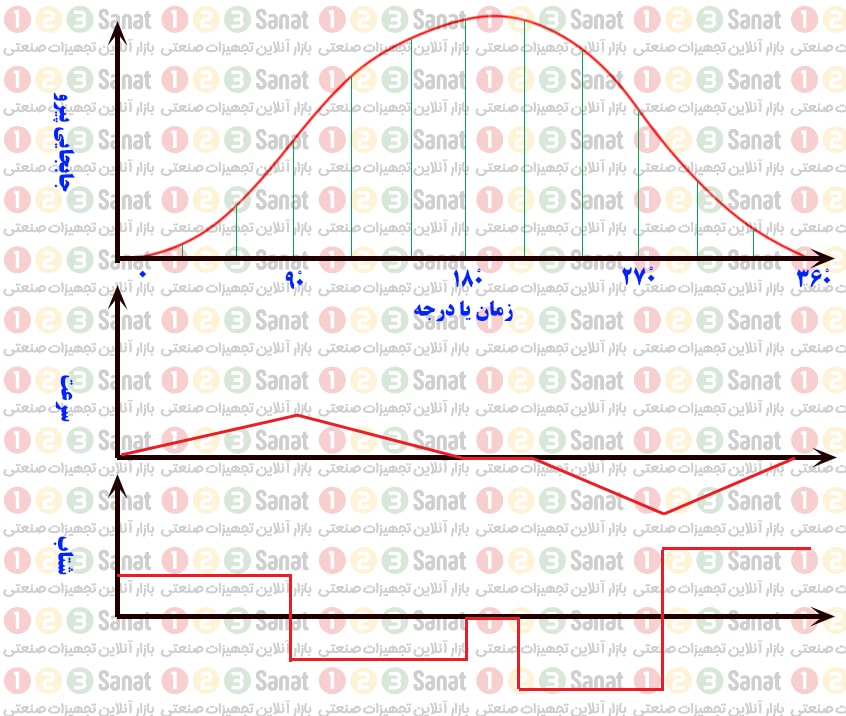
بادامکها بر اساس مشخصه نمودار جابجاییشان، تقسیمبندی میشوند که تغییر وضعیت، پیرو به هنگام گردش بادامک را مشخص میکند. برای مثال دیاگرام یک بادامک ساده معمولاً از ۴ قسمت تشکیل شده است.
۱) اوجگیری پیرو ($t1$)
۲) مرحله سکون یا تأخیر ($t2$)
۳) مرحله بازگشت ($t3$)
۴) تأخیر زمانی تا شروع حرکت بعدی ($t4$)
باید بدانید در نمودار فوق که مشاهده کردید محور افقی علاوه بر اینکه میتواند مقدار چرخش بادامک بر حسب درجه باشد، این قابلیت را دارد که زمان روی آن نوشته شود.
نمودارهای جابجایی در مکانیزم بادامک مهمترین مشخصه بادامکها هستند چرا که با استفاده از تکنیک مشتق گیری بر حسب زمان از نمودار فوق، میتوان مقدار سرعت و شتاب را محاسبه کرد.
مفاهیم اولیه در بررسی بادامکها
قانون اول نیوتن یا قانون لختی بیان میکند که اگر نیروهای وارد بر جسم صفر باشد، اگر جسم در حالت سکون باشد تا ابد ساکن میماند، و اگر جسم در حال حرکت (با سرعت ثابت) باشد تا ابد با همان سرعت و در همان جهت به حرکت ادامه میدهد. قانون دوم نیوتن بیان میکند اگر به جسمی به جرم $m$ نیروی $F$ وارد شود جسم هم جهت با نیروی وارد شده شتاب $a$ میگیرد که برآیند نیروهای وارد شده برابر با $\Sigma F=m.a$ خواهد بود. هدف از ذکر قوانین اول و دوم نیوتن این بود که یادآوری شود، بادامک و پیرو همواره در معرض بارگذاری هستند و این سبب به وجود آمدن نیروی لختی که در برابر تغییر وضعیت بادامک و پیرو است میشود.
نیروی لختی یا نیروی اینرسی به صورت مستقیم با عملکرد بادامک و پیرو در ارتباط میباشد و باید در ملاحظلات مهندسی و بحث طراحی بادامک و پیرو آن را لحاظ کنیم. بادامکهایی که در ماشین آلات با سرعتهای بالا کار میکنند، باید مقدار نیروی اینرسی را به حداقل ممکن برسانیم تا از بروز ارتعاشات، لرزش و حتی سایش بادامک و پیرو تا حد امکان جلوگیری به عمل بیاوریم.
لذا بر همین اساس برای محاسبه تغییرات شتاب در مجموعه بادامک و پیرو، از مشتق شتاب نسبت به زمان استفاده میکنند که به آن جرک (jerk) نیز گفته میشود. واحد جرک بر حسب $m/t^{3}$ است که به صورت زیر تعریف میشود.
$j=\frac{d(a)}{d(t)}$
در بحث ارتعاشات، جرک نقش مهمی را ایفا میکنند و بررسیها نشان داده است که اگر مقدار جرک بینهایت باشد سبب بروز ارتعاشات و تضعیف عملکرد بادامک و پیرو میشود. لذا بر همین اساس ما 4 نمونه اصلی از منحنی جابجایی بادامکها را خدمت شما دوستان عزیز توضیح خواهیم داد.
بررسی منحنی جابجایی بادامکها
بررسی حرکت پیرو با شتاب ثابت
در عملکرد بادامک و پیرو، یکی از انواع حرکت پیرو با شتاب ثابت انجام میشود. معادله مکان هر جسمی که با شتاب ثابت حرکت کند به صورت زیر است لذا نمودار مربوط به جابجایی و زمان، یک سهمی درجه 2 خواهد بود.
$X=\frac{1}{2} a.t^{2}$
در نمودار مربوط به جابجایی و زمان، میتوانیم به جای زمان مقدار زاویه چرخش بادامک را بنویسم که در این صورت بهتر میتوانیم مفاهیم سرعت و شتاب زاویهایی را بیان کنیم.
مطابق نمودار زیر حرکت پیرو از سکون شروع میشود و اوج میگیرد تا مجدداً به سکون برسد (برای درک بهتر تصویر بالای این مقاله که مربوط به نمودار جابجایی است را نگاه کنید) شتاب پیرو در ابتدا از صفر تا مقدار معینی بالا میرود و سپس شتاب تغیر علامت میدهد و با شتاب کاهشی، سرعت پیرو را به صفر یا حالت سکون میرساند.
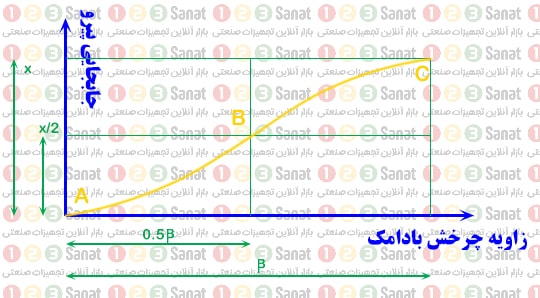
اگر ما کل مسیری که پیرو از سکون تا سکون را طی میکند با $AC$ نشان دهیم از $A$ تا $B$ شتاب مثبت بوده و از $B$ تا $C$ شتاب منفی است. کل جابجایی پیرو برابر با مقدار $x$ است و منتاظر نقطه $β$ روی محور زاویه چرخش است. مقدار جابجایی بادامک از رابطه $θ=ω. t$ که سرعت زاویهایی $ω$ است به دست میآید.
این صفحه را با دیگران به اشتراک بگذارید و امتیاز بگیرید
برای نوشتن دیدگاه باید وارد بشوید.