درس ۱۷: مکانیزم مستقیم الخط (چهار میلهایی)
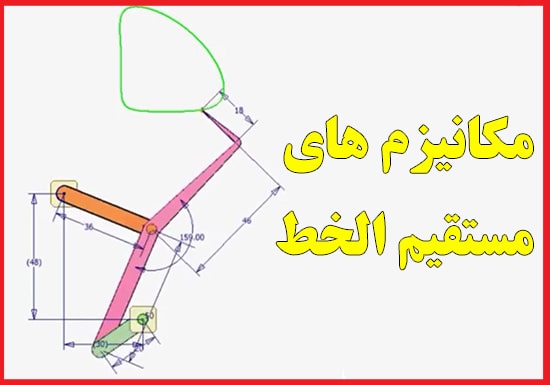
مکانیزم چبیشف در مکانیزمهای تعلیق خودرو، رباتهای انسان نما و مکانیزمهای رباتهای مریخ نورد استفاده میشود. در سال ۲۰۰۴ میلادی، در دانشگاه ازمیر ترکیه با ترکیب محققین توانستند با توسعه مکانیزم چبیشف، مکانیزم زیر را معرفی کنند که در آن توزیع نیرو برای برای یک حرکت مستقیم الخط به صورت مساوی انجام میشود.
این صفحه را با دیگران به اشتراک بگذارید و امتیاز بگیرید
رضا رستمی
برای نوشتن دیدگاه باید وارد بشوید.