درس ۱۸: مکانیزمهای گریپر (پنجه رباتیک)

آشنایی با مکانیزمهای گریپر (پنجه رباتیک)
در دروس قبلی آشنایی با علم طراحی مکانیزمها، مکانیزمهای مختلفی را بررسی کردیم که میتوانید آنها را در سری مقالات [ علم طراحی مکانیزمها ] مطالعه کنید. در این قسمت قصد داریم تا شما را با انواع مکانیزمهای گریپر (پنجه رباتیک) آشنا کنیم.
مکانیزمهای گریپر (پنجه رباتیک) یکی از مؤثرترین و پرکاربردترین مکانیزمهای مهندسی هستند که در کارخانه جات تولیدی به منظور بالا بردن جابجا کردن و…. مورد استفاده قرار میگیرند.
از ابتدای بحث آشنایی مکانیزمهای گریپر (پنجه رباتیک) میخواهم کمی در مورد رباتها و جایگاه گریپرها صحبت کنم و در ادامه بحث چند مکانیزم گریپر (پنجه رباتیک) را مشاهده و بررسی خواهیم کرد.
ربات چیست و چه وظایفی را انجام میدهد؟
قابلیت برنامهریزی رباتهای صنعتی توسط کامپیوتر، این امکان را فراهم میکند که بتوان رباتها را به روشهای مختلف سازماندهی کرد. علم رباتیک، علمی است که چگونگی انجام این مهم را به ما نشان میدهد.
ربات چیست؟ یک تعریف کلی قابل قبول که برای ربات ارائه شده است، عبارت است از: دست مکانیکی چند منظوره قابل برنامهریزی که برای جا به جایی مواد، قطعات، ابزارها و وسایل خاص طراحی شده و حرکتهای لازم مختلف برای انجام وظایف مختلف را انجام میدهد.
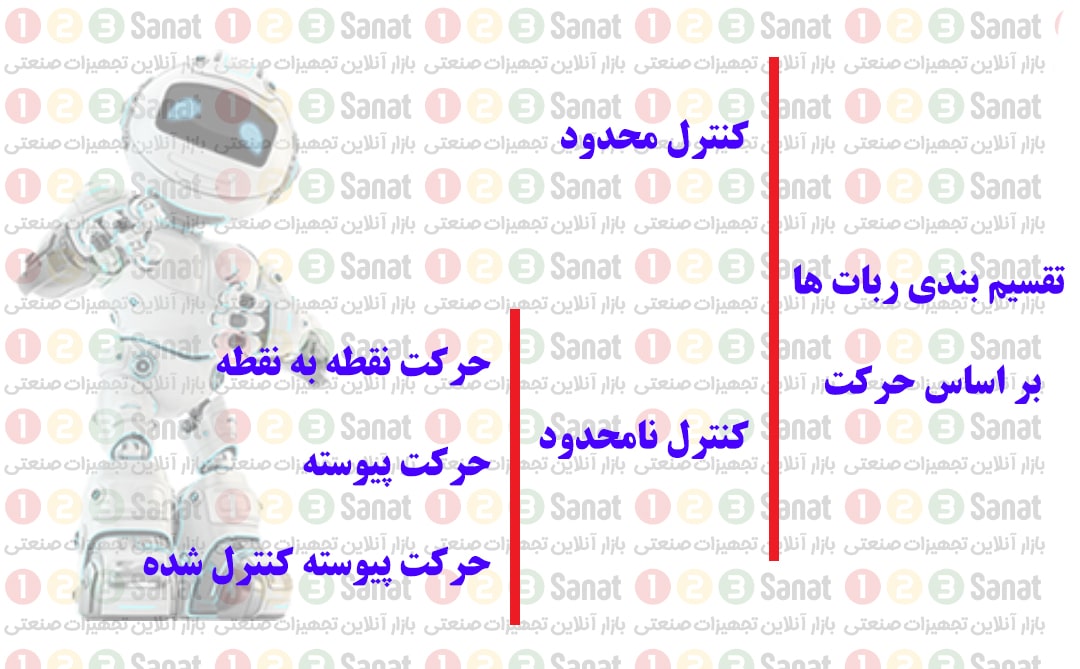
رباتها را میتوان برای قرار گرفتن روی زمین، روی میز و یا به صورت متحرک طراحی نمود. رباتها را بر اساس مشخصات سیستم کنترل، شکل و ساختار بازو و قابلیت جهتگیریهای مختلف آن دستهبندی میکنند. البته یک توافق عمومی و استاندارد برای این دستهبندیها هنوز در کتابها و بین متخصصان روبوتیک به وجود نیامده است. یک دستهبندی اساسی برای رباتها در رابطه با توانمندیهای کلی این وسیله صورت گرفته و آنها را به دو دسته با کنترل محدود و نامحدود در توالی عملیات تقسیم کرده است.
و رباتهای دارای کنترل نامحدود، به سه زیر دستهی شامل حرکت نقطه به نقطه، حرکت پیوسته و حرکت پیوسته کنترل شده تقسیمبندی میشود. بدین ترتیب رباتها در چهار گروه زیر قابل دستهبندی هستند.
تقسیمبندی فوق بر اساس حرکت رباتها که شامل قسمتی از آنها مانند گریپر، بازو یا ابزار قرار گرفته روی آن یا شامل حرکت کل ربات است. علاوه تقسیمبندی رباتها بر اساس حرکت، آنها را میتوان بر اساس سیستم کنترل نیز تقسیمبندی کرد که به دو نوع زیر قابل تقسیمبندی هستند.
۱) سرو (Servo)
۲) غیر سرو (Non-Servo)
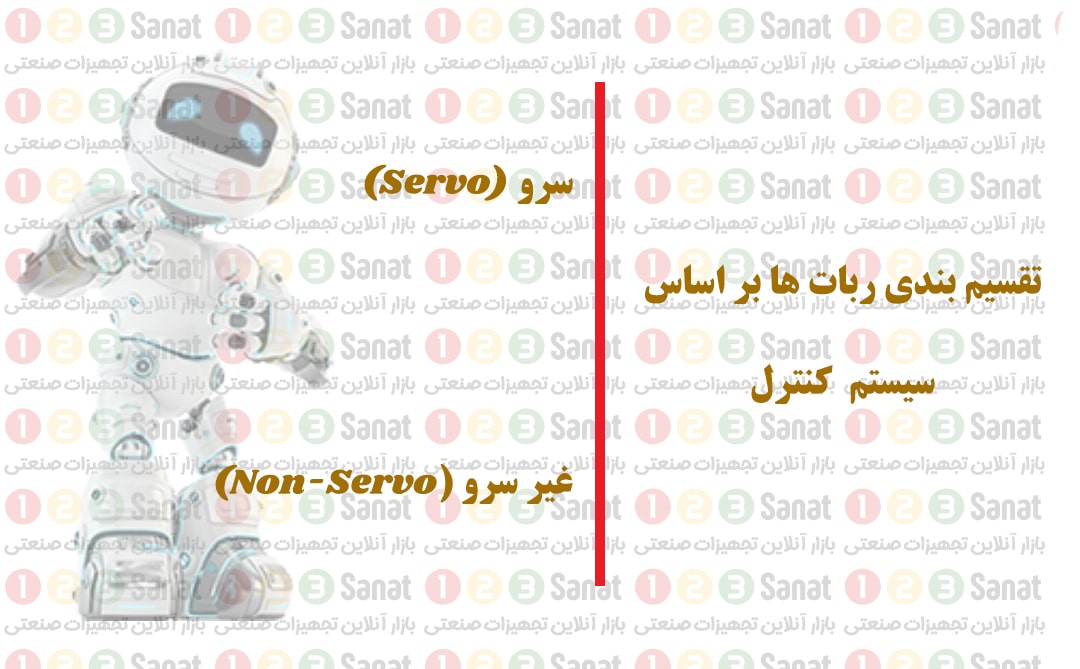
در نوع سرو (Servo)، رباتها از فیدبک عواملی نظیر سرعت، موقعیت و یا هر دو در مدار بسته کنترلی ربات استفاده میکنند.
در نوع غیر سرو (Non-Servo)، رباتها از کنترل مدار باز یا کنترل بدون فیدبک استفاده شده است.
منبع تغذیه رباتها توسط موتورهای الکتریکی یا مدار هیدرولیکی یا نیوماتیکی تأمین میشود. که به صورت کلی و یک قاعده سرانگشتی، امروزه به طور معمول برای رباتهای متداول از نیروی موتورهای الکتریکی استفاده میگردد. از نیروی هیدرولیکی برای رباتهای که کارهای سنگین انجام میدهند، استفاده میشود و از نیروی نیوماتیکی برای رباتهایی که سرعت عمل مهم است استفاده میشود.
درجه آزادی ربات چیست؟
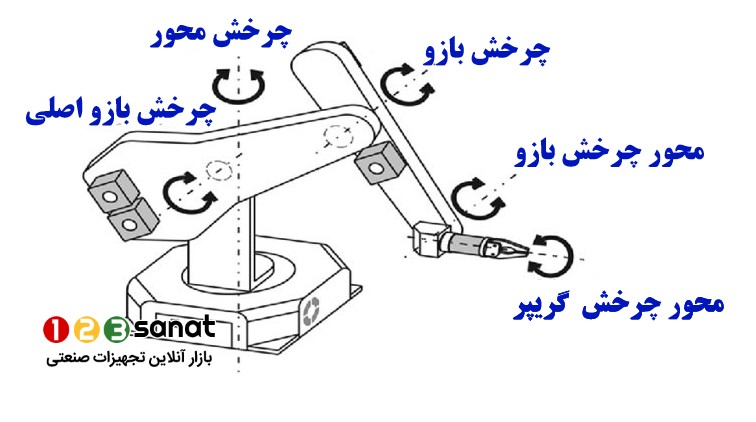
تعداد درجات آزادی در یک ربات، در واقع تعداد محورهای حرکتی و گردشی است که یک مشخصه با اهمیت در قابلیتهای عملکرد یک ربات خواهد بود. رباتهای با توالی عملیاتی محدود معمولاً دارای دو و یا حداکثر سه درجه آزادی هستند ولی رباتهای با حرکت نقطه به نقطه و حرکتهای پیوسته، پنج یا شش درجه آزادی دارند.
درجات آزادی در یک ربات، با یک تابلوی کنترل، به یک کامپیوتر دیجیتال متصل میشود که با سیستم عامل و نرمافزارهای کاربردی برنامهریزی شده است، ربات را برای ایفای وظایف کنترل میکند. در تصویر زیر تعداد درجات آزادی یک ربات گریپر را مشاهده میکنید که ۵ درجه آزادی دارد.
ربات در مقایسه با بازوهای مکانیکی
رباتهای واقعی را باید از دستهای مکانیکی که به صورت دستی کنترل میشوند، متمایز دانست. بازوهای مکانیکی که از راه دور توسط انسان هدایت میشوند و قابلیت برنامهریزی برای انجام عملیات خودکار را ندارند گاهی اوقات به اشتباه ربات خوانده میشوند. این اشتباه از آنجا ناشی شده که این بازوهای مکانیکی بعضاً شبیه ربات هستند و از قطعاتی مشابه تشکیل شدهاند.
بازوهای مکانیکی از راه دور توسط سیم یا ارتباط رادیویی کنترل میشوند. مثالهای نمونه از بازوهای مکانیکی عبارتند از:
بازوهای مکانیکی که در آزمایشگاهها برای نصب کردن قطعاتی که محیط خطرناک مانند رادیواکتیو مورد استفاده قرار میگیرند.
بازوهای مکانیکی را همچنین میتوان برای کار در اعماق دریا و یا جمعآوری نمونهها واشیا از محیطهای غیر قابل دسترسی مانند لولههای تنگ مورد استفاده قرار میگیرند.
در این دستگاهها اپراتور، به دور از محیط کار بازوی مکانیکی یا ربات کنترل شونده با تلویزیون و دوربین مدار بسته، نمای موقعیت کاری را مشاهده کرده و خواهد توانست به دقت عملیات را هدایت کند.
بازوهای مکانیکی را میتوان به صورت متحرک ساخت که چرخهایی شبیه تانک دارند و میتوانند در زمینهای ناهموار جابه جا شوند. این ماشینها را میتوان به دستهای مکانیکی با سه درجه آزادی یا بیشتر نیز مجهز نمود.
لذا آنچه که برای ما مشخص شد این است که رباتها قادر هستند خودشان یک برنامه از پیش تعیین شده را انجام بدهند که این کار عموماً تکرارپذیر است اما بازوهای مکانیکی باید توسط یک شخص کنترل شوند.
مکانیزمهای گریپر (پنجه رباتیک) هم میتوانند برنامهریزی شوند و یک کار مکانیکی را انجام بدهند و هم میتوانند توسط شخص از راه دور کنترل شوند.
این صفحه را با دیگران به اشتراک بگذارید و امتیاز بگیرید
برای نوشتن دیدگاه باید وارد بشوید.